The capacity of platooning technology to precisely control cars, optimize traffic flow, and increase energy economy is well known. Platooning reduces aerodynamic drag, boosts fuel efficiency, and expands road capacity by enabling vehicles to move in close proximity and in unison. However, a number of issues arise when it comes to large-scale mixed platoons, which are made up of cars with different degrees of automation, intelligence, and communication capabilities.
The formation of virtual bottlenecks is one of the biggest issues. Virtual bottlenecks occur when anomalies in vehicle behavior and responses lead to disturbances in the smooth flow of traffic within the platoon. These bottlenecks are generally generated by the variety of vehicles in the platoon, where variances in driving behavior, reaction times, and communication capabilities can contribute to reduced traffic throughput and greater energy usage. A human-driven vehicle or a less sophisticated autonomous vehicle, for example, can abruptly alter its speed or fail to keep a constant distance, which can impact the entire platoon. This domino effect can cause a lot of inefficient stop-and-go traffic, which would require more energy.
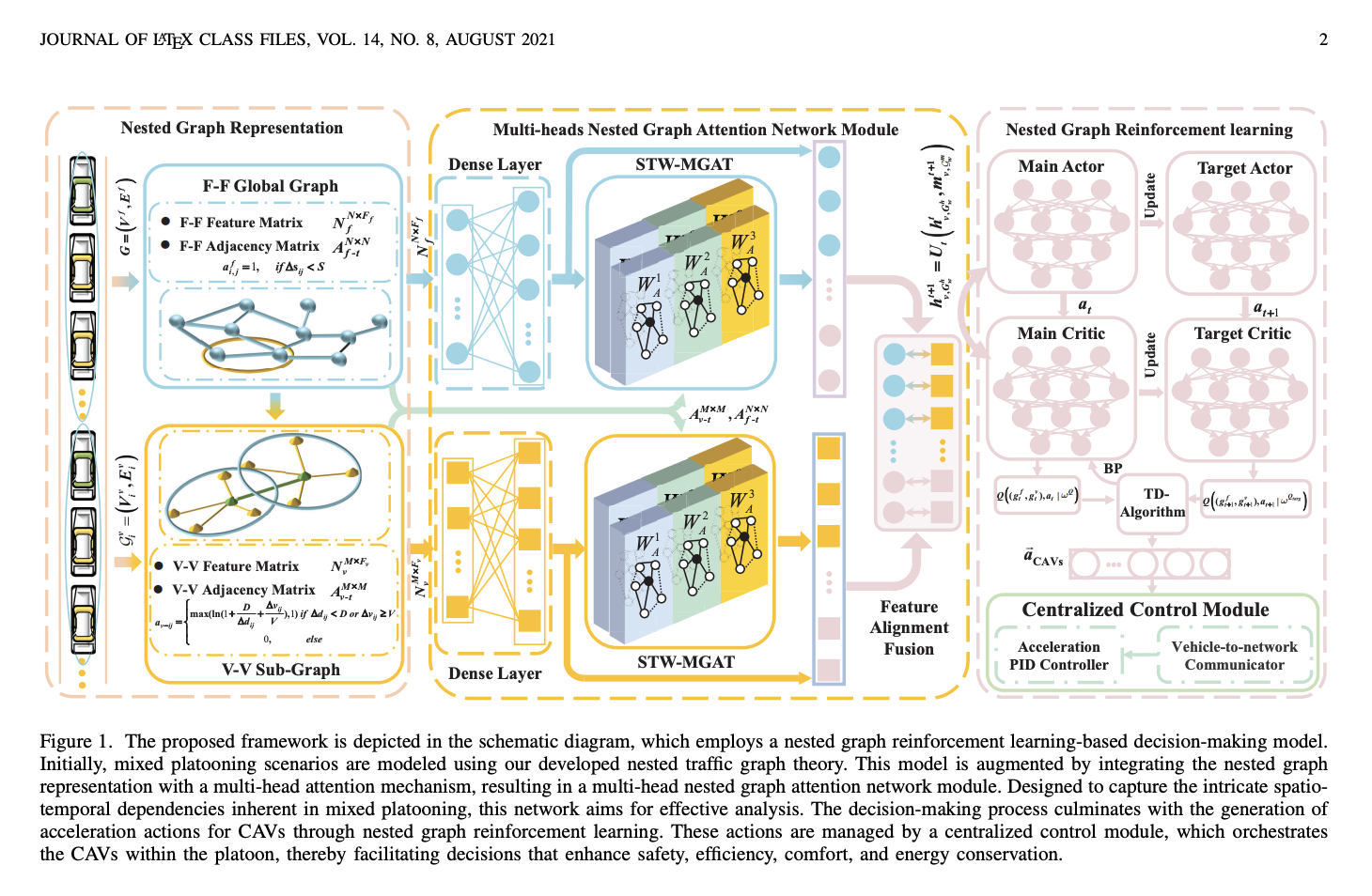
To address these issues, a unique approach to decision-making based on stacked graph reinforcement learning has been presented. The main objectives of this tactic are to improve cooperative decision-making inside the platoon to lessen traffic and increase energy efficiency. The uniqueness of this method is the creation of a theory of nested traffic graph representation. This theory can accurately reflect the complex, non-linear relationships that exist in real-world traffic circumstances by mapping dynamic interactions between vehicles and platoons in non-Euclidean regions.
The strategy’s multi-head attention mechanism integrates a spatiotemporal weighted graph. This integration greatly improves the model’s capacity to handle both local data, like the immediate surroundings of each vehicle, and global data, like the platoon’s general composition and actions. By doing so, the model can more correctly predict and respond to changes in traffic circumstances, resulting in more efficient and stable platoon operations.
A nested graph reinforcement learning framework has also been created to improve the platooning system’s capacity for self-iterative learning. This implies that the system can make better decisions over time by continuously learning from its experiences, which will enable it to operate more effectively in dynamic and unexpected traffic situations.
The effectiveness of this approach has been demonstrated through a series of tests with the I-24 dataset. These included permeability ablation tests, generalisability evaluations, and comparative algorithm testing. The outcomes showed that the suggested approach works noticeably better than baseline methods. In particular, the approach lowered energy usage by 9% and enhanced traffic throughput by 10%.
One important discovery from the studies was the effects of increasing the rate at which connected and automated vehicles (CAVs) are incorporated into the platoon. Increased CAV penetration did result in further increases in traffic throughput, although there was a modest increase in energy usage as well. This implies that although CAVs can improve traffic flow efficiency, there is a trade-off in energy consumption, most likely because these vehicles need more resources for calculation and communication.
The team has summarized their primary contributions as follows.
- The problems of vehicular heterogeneity in mixed platoons, which frequently result in virtual bottlenecks, have been addressed by the development of a decision-making framework based on layered traffic graph theory. The framework comprises a nested graph representation of traffic, a multi-head nested graph attention network, a multi-objective dense reward model, and a nested graph Markov decision process (NG-MDP).
- An approach to layered graph representation has been shown that can be used to depict dynamic spatiotemporal interactions in non-Euclidean domains. This technique improves the accuracy of node feature information by recognizing and handling non-homogeneous cyclic graph architectures.
- By combining node attributes with spatiotemporal data, a dynamic weights adjacency matrix improves the representation of vehicle interactions. In conjunction with a multi-head graph attention mechanism, it enhances the model’s capacity to handle both local and global data.
- The framework has been validated using extensive simulation experiments, which showed enhanced energy efficiency, traffic flow, and congestion management in large-scale mixed platoons.
In conclusion, nested graph reinforcement learning is a big step forward in solving the problems posed by large-scale mixed platooning. Enhancing platoons’ capacity to adjust to diverse vehicle configurations and erratic traffic patterns can lead to increased efficiency and sustainability in transportation systems in the future.
Check out the Paper. All credit for this research goes to the researchers of this project. Also, don’t forget to follow us on Twitter and join our Telegram Channel and LinkedIn Group. If you like our work, you will love our newsletter..
Don’t Forget to join our 48k+ ML SubReddit
Find Upcoming AI Webinars here
The post Optimizing Large-Scale Mixed Platoons: A Nested Graph Reinforcement Learning Approach for Enhanced Decision-Making appeared first on MarkTechPost.