Maps are extensively used nowadays and are helpful in numerous location-based applications, including navigation, ride-sharing, fitness tracking, gaming, robotics, and augmented reality. As indoor localization technologies advance, the need arises for a scalable, federated mapping service that can manage indoor and private spaces while overcoming privacy, scalability, and compatibility issues. There is an increasing demand for a scalable, federated location management system that can extend into private spaces. As the use of location-based applications expands and indoor localization technologies advance, traditional centralized mapping infrastructures face challenges in terms of scale and privacy.
A few large corporations control current mapping services like Google Maps and Apple Maps and mainly cover outdoor areas, leaving a gap in the availability and privacy of indoor localization. They depend on pre-collected data, which hinders and limits its extension into private spaces. These systems struggle with privacy concerns and do not easily integrate with the rapid advancements in localization techniques. A team of CMU researchers has proposed OpenFLAME (Open Federated Localization and Mapping Engine), a federated and decentralized localization service. OpenFLAME links servers that handle localization for specific regions, opening gates for more applications. It utilizes the Domain Name System (DNS), which is used by computers to identify each other on the network. It translates human-understandable and readable domain names into IP addresses.
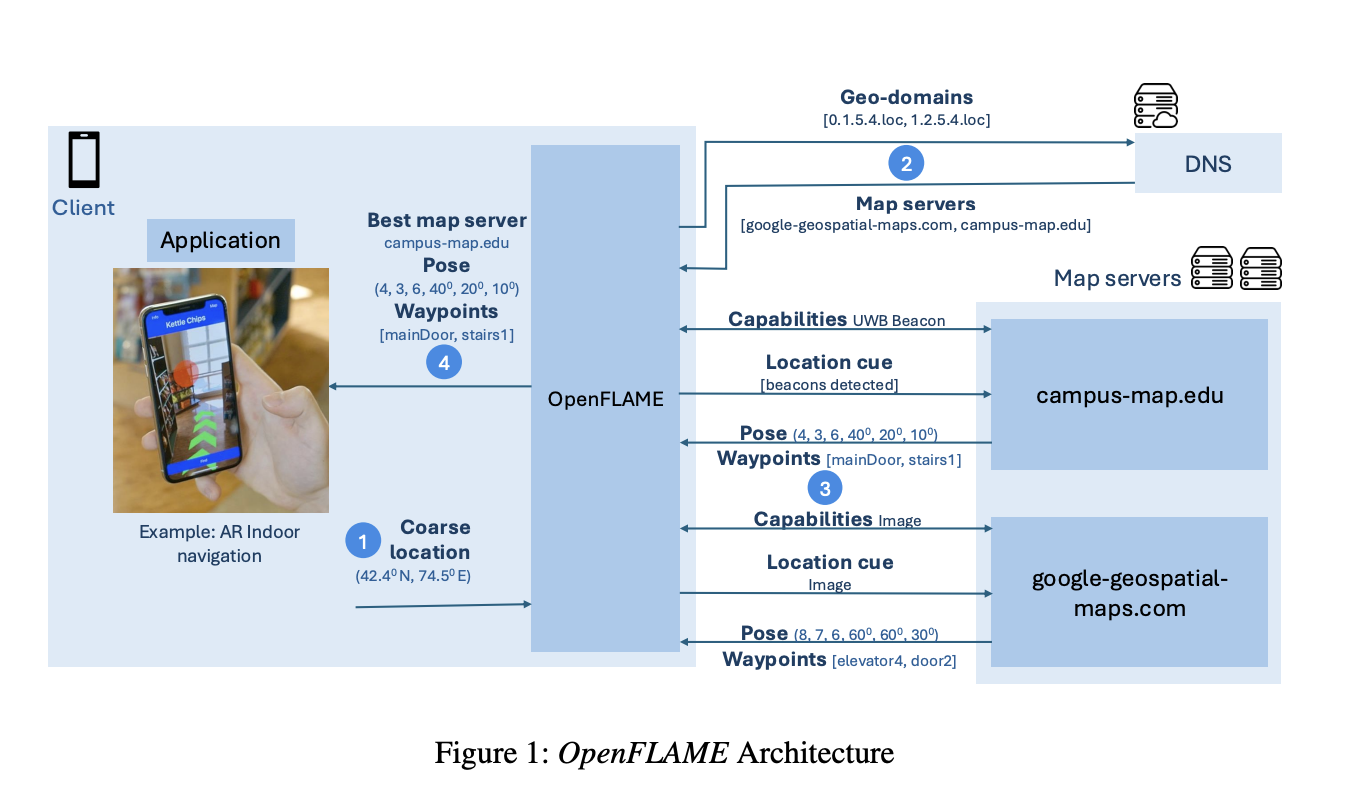
OpenFLAME connects devices to localized map servers and works around the Domain Name System to discover appropriate regional servers, ensuring scalability. Each map server generates its local coordinate system, using a structure of “waypoints” to help align overlapping maps while preserving privacy at the same time. A trace-driven study conducted by the same researchers demonstrated that federated localization across remote servers is feasible with acceptable query latencies.
The OpenFLAME architecture comprises many steps- Firstly, the device computes the location using sources such as GPS, WiFi, and Bluetooth, which is then converted into geo-domain names representing square regions. These geo-domains are used to access DNS lookups and find servers that offer map services for the area. The device sends all the information it has collected to these map servers, which determine the device’s locale and orientation precisely. The device then filters out all incorrect results and finds a suitable map server for its location. The best map server’s pose and waypoints are sent to the application. It periodically repeats the query to maintain accurate localization, switching map servers only when necessary.
In conclusion, OpenFLAME solves the challenges of privacy, scalability, and interoperability in indoor and private space localization by using DNS for service discovery and map abstractions. Today’s largely centralized approach to large-scale mapping and localization hinders the development of new location-based applications, and there is a strong need for a service like OpenFLAME!
Check out the Paper. All credit for this research goes to the researchers of this project. Also, don’t forget to follow us on Twitter and join our Telegram Channel and LinkedIn Group. If you like our work, you will love our newsletter.. Don’t Forget to join our 55k+ ML SubReddit.
[Upcoming Live LinkedIn event] ‘One Platform, Multimodal Possibilities,’ where Encord CEO Eric Landau and Head of Product Engineering, Justin Sharps will talk how they are reinventing data development process to help teams build game-changing multimodal AI models, fast‘
The post CMU Researchers Propose OpenFLAME: A Federated and Decentralized Localization Service appeared first on MarkTechPost.